











友情链接
激光雷达,到底是不是满清遗老遗少的辫子?
2025/6/24 10:10:37
0浏览
前段时间,小鹏汽车品牌公关负责人讥讽激光雷达阵营的支持者,表示“脑后的辫子是时候要考虑剪掉了”。
一石激起千层浪,迅疾引发了激光雷达支持者的一致声讨。
那么,在FSD展现出超强实力的情况下,在小鹏图灵AI视觉方案超级能打的背景下,激光雷达是不是真的就是满清余孽脑后的辫子呢?
01
有人的地方就有江湖,有江湖的地方就有纷争。
随着特斯拉FSD的低调入华和小鹏对图灵AI视觉方案的高调宣传,国内辅助驾驶行业里又展开了关于激光雷达到底是不是自动驾驶系统必选件的大讨论,至今还没吵出来一个标准答案。
不过,可以肯定的是,至少在L2++这个阶段,激光雷达不是必选项。

用一句话总结特斯拉和小鹏方案的特点,便是以强AI辅助弱感知。在此要搬出行走的第一性原理代言人马斯克经常讲的那句话了:道路是为眼睛和生物神经网络设计的。
解读一下就是说,既然人类可以通过视觉信息+大脑处理成为一个合格的驾驶者。
那么,自动驾驶系统通过摄像头+深度学习神经网络也可以达到类似的效果。

说实话,这个朴素的类比真的暗合道妙。
但是,由于在过去的很多年里,摄像头的感知能力相对较弱,相较于多传感器融合方案,视觉方案始终存在感知能力较差的缺陷。
在之前的技术条件下,摄像头的动态范围HDR相对不足,造成亮部、暗部的细节丢失;
HDR下限不足,导致其在弱光环境下噪声大、性能差;
HDR上限不足,叠加过曝控制能力差,导致其在强光环境下因传感器饱和丢失亮部细节。
虽说人眼也会因为生理限制面临弱光下看不清、亮光下睁眼瞎的问题。
但是,人类那颗相当于百万亿神经网络参数的脑袋,可以脑补中低程度弱光、亮光环境下的感知。
正是基于同样的逻辑,特斯拉一直以来都在孜孜于提升改进AI视觉神经网络的架构,提升神经网络的规模,以AI能力的进步弥补摄像头的性能缺陷。
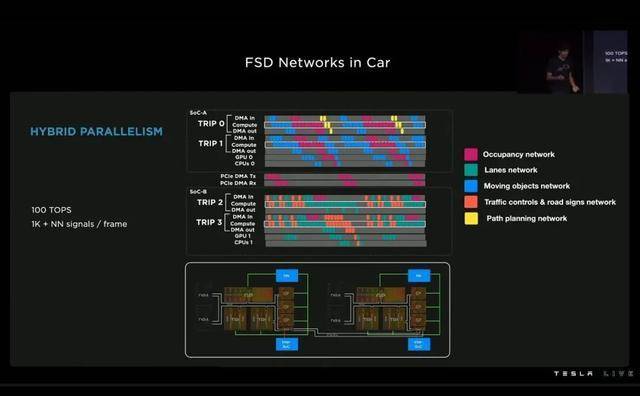
经过多年的攻坚,特斯拉、小鹏率先实现了非极端光照条件下的城区NOA,既然特斯拉FSD和小鹏视觉版XNGP已经证明了激光雷达的非必要性,再嘴硬L2++也离不开激光雷达就没什么意思了。
02
张口L3,闭口L3,但其实很多人根本分不清楚L2++与L3的区隔条件。
鉴于国内尚未批准任何一款L3车型的商业化,我们只能从问世多年以至于有些不太符合行业发展程度的自动驾驶分级标准文件里去找它们的核心区别了。
按照 《汽车驾驶自动化分级》的标准文件,L2++与L3的核心区别在于责任主体不同、系统边界条件ODD不同。
从责任主体来看,甭管L2后面有几个加号, 驾驶员是所有L2级辅助驾驶系统的责任主体,到了L3有条件自动驾驶,系统就要在ODD内承担驾驶责任。
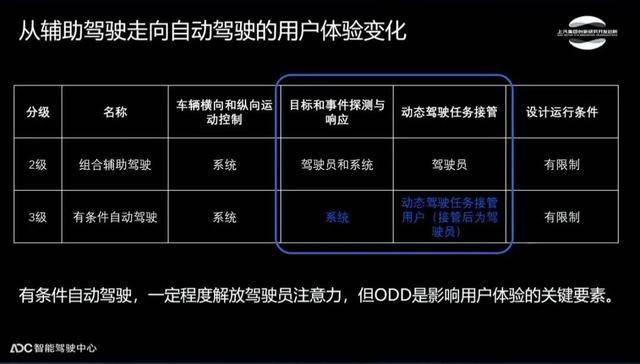
责任主体的划分更多是商业取舍问题。从技术能力来看,设计运行域ODD/系统边界定义不同才是L2与L3的真正分野。
对于可以随时退出的L2级辅助驾驶来说,ODD压根就不存在严格的定义,在各家车企关于L2++辅助驾驶的宣传口径里,个个对ODD的定义都是“全场景”。
之所以如此,就是因为它能够随时退出,所以才能随时接管动态驾驶任务嘛。
L3就不一样了,它需要定义严格的ODD,只要在ODD之内,便由系统接管动态驾驶任务,只有跳出了ODD的边界条件,系统才可以撂挑子不干。

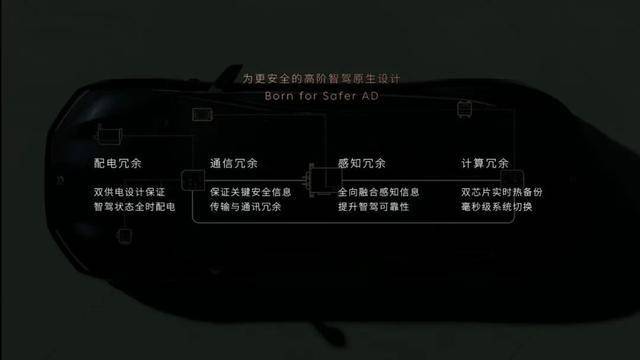
这种严苛的要求反映到整车上,就意味着需要通过冗余设计降低系统失效的概率,保证系统的鲁棒性。
整车层面需要实现感知、决策、制动、转向、通讯、电源、定位的双重冗余,感知层面,需要在摄像头之外,以激光雷达、毫米波雷达辅助实现感知的冗余。
作为一种冗余件,激光雷达保障着系统在弱光、强光下的主动安全。
知道有人会哪壶不开提哪壶,重提马上就要开展Robotaxi业务的特斯拉FSD。
的确,最新版FSD的评测视频再次展现了其独步天下的能力。
但是,视觉方案的FSD能在大漂亮开展Robotaxi业务,是不是只不过意味着马总管和懂王在拿老百姓的生命安全做利益交换?
03
万事万物,皆有因果。
小鹏汽车品牌公关负责人敢于冒天下之大不韪,斥激光雷达的支持者为满清余孽,给他们安上脑后的辫子,是因为以发展的眼光来看,视觉方案的辅助驾驶系统能力会越来越强。
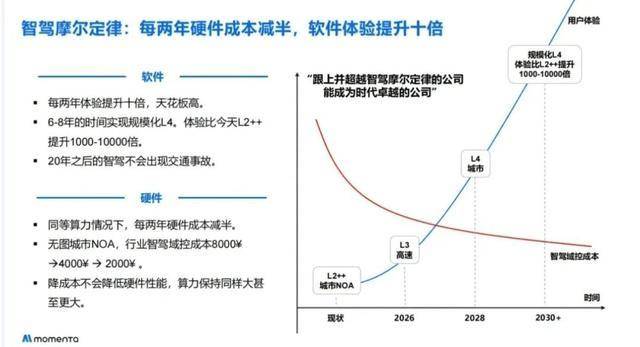
这一方面得益于车端算力成本正沿着摩尔定律的曲线下降,车端算力规格会不断提升,叠加多模态大模型能力的进步,车端的AI能力会越来越强。
另一方面,摄像头本身的感知能力也在光电技术的推动下不断发展,正在由弱感知传感器进化为强感知传感器。
目前,摄像头在感知上还存在抗暗光、抗强光、抗炫光能力不足的缺陷,但是,摄像头的感知能力会在光电技术、新材料的推动下不断向前发展。
摄像头感知能力的进步会体现在两个方面。
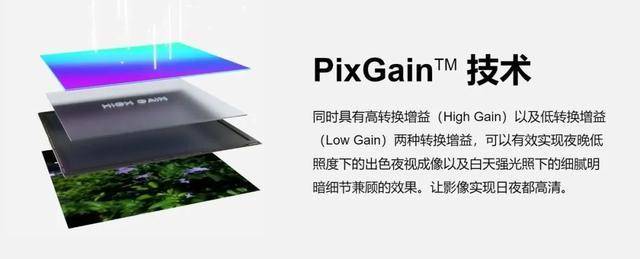
一,图像传感器芯片的动态范围HDR会大幅度提升,在过去五年里,图像传感器的动态范围出现了显著的突破,主流商用产品的HDR从100dB跃升至140dB,未来几年还会向着200dB继续演进。
HDR指的是传感器能够同时捕捉的最亮区域与最暗区域的亮度跨度,它直接决定了摄像头在极端光照条件下的感知能力。
HDR的提升显然可以帮助应对隧道逆光场景下的细节丢失、夜间复杂光照下的物体识别、运动物体的伪影、高速场景的实时响应等难题。
摄像头感知能力的第二项进步对激光雷达更致命。
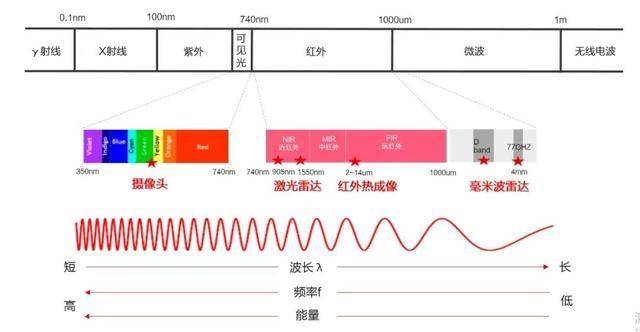
之前,摄像头的光谱仅仅覆盖可见光频段,近年来,通过硬件创新、多光谱集成技术,摄像头开始出现光谱拓宽的趋势,即在可见光之外融合红外光谱,要知道,激光雷达光谱正处于近红外频段。
宽光谱摄像头果真能够商业化,车辆在无光条件下也能行驶了,这可是激光雷达最后的禁地了!
当然,这里有一个值得深思的问题,既然人眼看不见可见光,辅助驾驶系统使用能够看见非可见光区域的摄像头,还能叫视觉方案吗?
FSD在暗夜中行驶、迎着夕阳行驶时退出让驾驶员接管的情形屡见不鲜,这固然证明在当前的发展阶段,能够避免这种情形的激光雷达是L3有条件自动驾驶的必选件。
但是,一旦摄像头本身的性能产生裂变,视觉方案的辅助驾驶系统在暗光、强光、炫光条件下自如行驶并非天方夜谭,到时候,重新定义了摄像头的马斯克又得封神了!
标签:
举报
全部评论.0
0/150
发布
按热度
按时间
暂无评论,快来抢沙发吧
热门视频
